
Организация перевозок грузов по малым рекам является довольно сложной и трудоемкой задачей. Перевозки возможны по различным схемам с использованием крупнотоннажных и малотоннажных судов.
В проекте предлагается обосновать схему перевозок и вариант движения флота методом динамического программирования, который позволяет получить оптимальное решение в поставленных условиях без просмотра всего количества вариантов.
Исходными данными для обоснования схемы перевозок являются:
- вариант грузопотока;
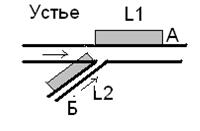
Пункт отправления на магистрали (А) расположен ниже устья притока.
- размер грузового потока на расчетном участке;
G = 44 тыс.т.
- технико-эксплуатационные и экономические характеристики буксирных и несамоходных судов;
- путевые условия по участкам работы;
глубина судового хода 1,5 м, Lмаг = 750 км, Lмр = 350 км
- нормативы использования флота;
- период завоза грузов на малую реку.
Тзав = 42 сут.
- Технико-эксплуатационные и экономические характеристики судов
- Путевые условия
- Нормирование загрузки судов
- Нормирование скорости составов
- Определяется приведенное сопротивление состава. Способ вождения судов принят толканием
- Определяется скорость состава относительно воды
- Определяется техническая норма скорости по выражению
- Начальный пункт
- Нормирование времени в промежуточном пункте
- Нормирование времени в конечном пункте